Unitree R1 Basic Humanoid Robot (R1 Basic)
")
En stock
- MARQUE:
- UNITREE ROBOTICS
- MODÈLE:
- R1 BASIC
- ORIGIN:
- Chine
- Warranty:
- 8 MOIS
- AVAILABILITY:
- EXPÉDIÉ GÉNÉRALEMENT DANS LES 7 À 14 JOURS OUVRABLES
- SKU:
- Unitree-Robotics-R1-Basic
Contrairement aux humanoïdes de service optimisés pour les tâches ménagères ou le travail en entrepôt, le R1 Basic a été principalement caractérisé comme une plateforme orientée développeurs: un bipède petit et relativement léger destiné aux laboratoires, aux startups et aux environnements éducatifs qui souhaitent un facteur de forme humanoïde pour tester la génération de démarche, le contrôle de l'équilibre, la planification de mouvements corporels et l'interaction homme-robot. Les spécifications rapportées—telles qu'une masse d'environ 25 kg et 26 articulations—le placent dans une classe d'humanoïdes qui privilégient l'agilité et l'accessibilité financière plutôt que la capacité de charge lourde.
Conception et caractéristiques
Facteur de forme humanoïde et mobilité
Le R1 Basic suit une disposition classique d'humanoïde bipède (torse, deux jambes et structure du haut du corps), mettant l'accent sur les mouvements dynamiques. Les premières couvertures médiatiques ont mis en avant des séquences de démonstration impliquant des mouvements athlétiques (par exemple, des mouvements semblables à des roues et des gestes frappants), qui sont des vitrines typiques pour les humanoïdes modernes car elles testent l'équilibre, la coordination et la réactivité des actionneurs.
Philosophie de construction légère
Dans les descriptions publiques, le R1 est présenté comme une plateforme légère par rapport à de nombreux humanoïdes de taille réelle qui visent des charges industrielles. Un robot plus léger réduit généralement les exigences de couple des actionneurs, peut simplifier la gestion des chutes et peut réduire le coût total du système—au détriment de la force de levage et de l'endurance sous charge.
Programmabilité orientée développeur
La couverture du R1 le décrit fréquemment comme programmable et ciblé vers les développeurs—ce qui signifie que la plateforme est destinée à soutenir des comportements personnalisés, des séquences de mouvement et des flux de travail de recherche (par exemple, des politiques d'apprentissage par renforcement pour la locomotion ou la navigation pilotée par la perception).
Remarque : La pile logicielle spécifique, les détails du SDK et le middleware pris en charge (par exemple, ROS/ROS 2) peuvent varier selon la génération de produit et la configuration ; les acheteurs potentiels confirment généralement ces éléments dans la documentation officielle ou les devis.
Technologie et spécifications
Structure mécanique et degrés de liberté
Les rapports publics ont cité le R1 Basic à environ 25 kg avec 26 articulations, suggérant une architecture multi-articulée qui peut soutenir le mouvement corporel complet et des mouvements expressifs plutôt que de se limiter à une marche bipède minimale.
Dans les robots humanoïdes, les « articulations » font généralement référence aux degrés de liberté actionnés à travers les hanches, les genoux, les chevilles, le torse/la taille, les épaules, les coudes, et parfois les poignets ou les mécanismes de main selon la variante.
Actionnement et contrôle de mouvement (caractéristiques générales)
Bien que les spécifications détaillées des actionneurs ne soient pas systématiquement publiées au même endroit dans les médias, les humanoïdes de cette classe s'appuient généralement sur des actionneurs électriques avec détection intégrée (estimation de position/vitesse/couple) et contrôle en boucle fermée pour maintenir l'équilibre. Les couches de contrôle de base incluent généralement :
-
Estimation d'état (IMU + détection des articulations) pour inférer l'orientation et la stabilité du corps
-
Contrôle corporel complet pour coordonner les jambes et le haut du corps sous contraintes
-
Génération de démarche pour la marche, les virages et les manœuvres de récupération
-
Détection de chute et comportements de récupération pour limiter les dommages et réinitialiser la posture
Perception et interaction
Certains rapports attribuent au R1 des capacités de reconnaissance vocale et d'image (souvent discutées de manière générale comme des « fonctionnalités IA »).
En pratique, ces capacités peuvent varier de la perception embarquée à des flux de travail connectés ou de calcul en périphérie, selon le module informatique et le package de caméra/capteur inclus avec un achat donné.
Positionnement dans le portefeuille humanoïde de Unitree
L'élan plus large de Unitree vers les humanoïdes (aux côtés d'autres modèles commercialisés pour la recherche et les essais industriels) est souvent discuté dans le contexte de la croissance de l'entreprise et du secteur en expansion de la robotique humanoïde en Chine.
Ce contexte est important car il influence le soutien à long terme : les mises à jour du firmware, la disponibilité des pièces de rechange et le développement continu de l'écosystème sont souvent liés aux priorités stratégiques du fabricant.
Applications et cas d'utilisation
Recherche en robotique et IA incarnée
Le R1 Basic s'intègre le mieux dans la recherche et le prototypage, y compris :
-
Apprentissage par renforcement pour la locomotion bipède (formation de politiques en simulation et transfert vers le matériel)
-
Planification de mouvement corporel complet pour l'équilibre, le pas et le rejet de perturbations
-
Apprentissage par imitation pour des gestes et des séquences de mouvement
-
Expériences d'IA incarnée où la perception informe les décisions de mouvement
Éducation et instruction en laboratoire
Les universités et les programmes techniques peuvent utiliser des humanoïdes plus petits pour enseigner :
-
La théorie du contrôle (contrôle PID/espace d'état) appliquée aux systèmes instables
-
La cinématique et la dynamique des robots (modélisation multi-lien)
-
La fusion de capteurs et les systèmes en temps réel
-
L'ingénierie de la sécurité et les procédures opérationnelles pour les robots mobiles
Démonstrations, marketing et prototypes d'interaction
Les humanoïdes sont souvent déployés dans des environnements contrôlés pour des démonstrations, des événements et des prototypes d'interaction homme-robot en phase précoce—surtout lorsque l'objectif est d'évaluer l'acceptation du public, des modèles d'interaction, ou des interfaces de parole/vision plutôt que la production de travail lourd.
Avantages / Bénéfices
Coût d'entrée inférieur dans le développement humanoïde
Le principal avantage associé au R1 Basic est l'accessibilité des prix par rapport à de nombreux humanoïdes qui sont rapportés à des dizaines de milliers à des centaines de milliers de dollars.
Un prix plus bas peut élargir l'adoption parmi les petites équipes et permettre des flottes de robots multiples pour la recherche sans qu'une seule plateforme coûteuse ne devienne un goulot d'étranglement.
Plateforme légère pour une itération plus sûre
Un robot plus léger peut réduire l'énergie cinétique lors des chutes et peut simplifier la manipulation, le transport et les opérations en laboratoire—important pour les équipes itérant rapidement sur les comportements de mouvement.
Adapté à l'expérimentation centrée sur le mouvement
Parce que les premiers récits se concentrent sur des démonstrations dynamiques, le R1 Basic est couramment discuté comme une plateforme pour des mouvements semblables à des sports, des travaux de démarche et des expériences de contrôle corporel complet—des domaines où les humanoïdes peuvent être particulièrement précieux par rapport aux robots à roues.
Section FAQ
Qu'est-ce que le robot humanoïde Unitree R1 Basic ?
Le Unitree R1 Basic est un robot humanoïde programmable positionné comme une plateforme à coût réduit pour les développeurs, les laboratoires et l'éducation, rapporté à environ 25 kg avec 26 articulations et un prix phare inférieur à 6 000 $ US dans la couverture de 2025.
Comment fonctionne le Unitree R1 Basic ?
Comme la plupart des humanoïdes, il combine actionneurs électriques, des capteurs d'articulation et un IMU avec un logiciel de contrôle en temps réel pour maintenir l'équilibre, générer des mouvements de marche et exécuter des mouvements corporels complets. Un logiciel de niveau supérieur peut ajouter des fonctionnalités de perception (basées sur la caméra) et d'interaction selon la configuration et la pile de calcul.
Pourquoi le Unitree R1 Basic est-il important ?
Il est surtout remarquable pour abaisser le coût d'entrée dans l'expérimentation en robotique humanoïde, permettant à plus d'équipes de tester le contrôle de la locomotion, l'IA incarnée et l'interaction homme-robot sans dépendre de plateformes humanoïdes beaucoup plus coûteuses.
Quels sont les avantages du Unitree R1 Basic ?
Les principaux avantages incluent l'accessibilité financière, un facteur de forme humanoïde pour la recherche et le travail d'interaction, et un plateforme légère adapté au développement itératif et à l'expérimentation de contrôle de mouvement.
Résumé
Le Le robot humanoïde Unitree R1 Basic est largement discuté comme une plateforme humanoïde accessible, axée sur les développeurs, qui privilégie le coût bas et et l'expérimentation centrée sur le mouvement. Avec des spécifications phares publiquement rapportées (environ 25 kg et 26 articulations) et un prix proche de 39 999 yuan, le R1 Basic reflète la tendance plus large de rendre la robotique humanoïde et l'IA incarnée plus accessibles pour les laboratoires de recherche, les universités et les startups—tout en nécessitant encore une évaluation minutieuse des détails de configuration, du support logiciel et de la disponibilité par région.
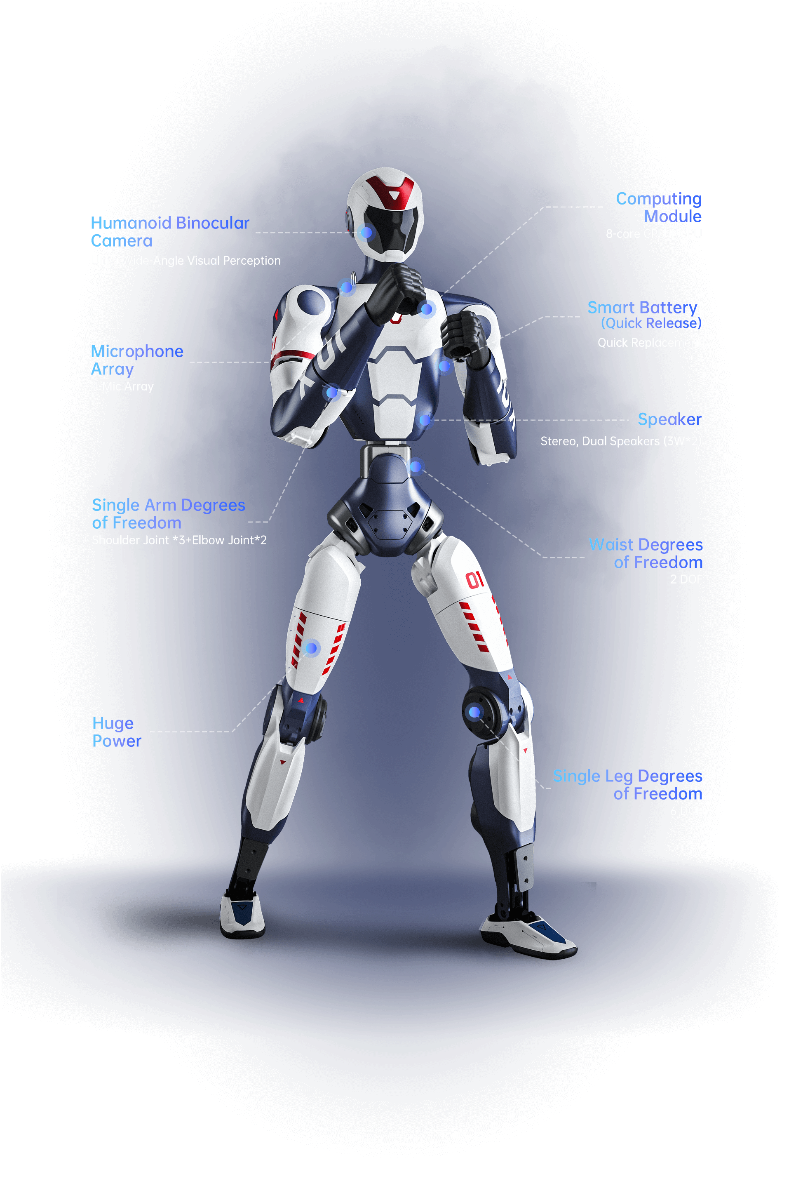
Hauteur, largeur et épaisseur (debout) : 1210x357x190mm
Poids avec batterie : Environ 25kg
Degré de liberté (articulations totales) : 24
Degrés de liberté par jambe : 6
Degrés de liberté pour la taille : 2
Degrés de liberté par bras : 5
Degrés de liberté par tête : Aucun
Charge maximale d'un bras : 2kg
Longueur du mollet + de la cuisse : 0,675m
longueur d'un bras : environ 0,435m
Plage de mouvement extrême des articulations :
Taille : Y ±150°, R ±30°
Genou : -10° à +148°
Hanche : Y ±157°, P -168° à +146°, R -60° à +100°
Articulations creuses avec routage de câbles internes : Oui
Codeurs d'articulation : Double + Simple
Système de refroidissement : Refroidissement par air localisé
Alimentation : Batterie lithium
Puissance de calcul de base : CPU haute performance à 8 cœurs
Haut-parleur et microphone standard
Wi-Fi 6, Bluetooth 5.2 : Oui
Capteur de perception : Caméra binoculaire humanoïde
Chargeur (1), batterie intelligente (libération rapide) (1)
Télécommande (1)
Autonomie de la batterie : Environ 1 heure
Mise à jour OTA intelligente : Prise en charge
Développement secondaire : Non
Garantie : 8 mois
Accessoires du robot :
1. Télécommande
2. Chargeur de batterie
3. Étui de transport pour robot
Support de protection non inclus par défaut